打造电梯行业新媒体!
| [打印] |
新技术在自动扶梯和自动人行道上的应用,使得其安全保护装置的形式多样化、性能更加可靠。在目前的产品技术标准和安全技术规范中,只是对必须设置的安全保护装置提出了要求,而对其形式没有具体的要求,也不可能给予具体的设计要求。从而,造成了有的产品设计从表面上看是实现了安全保护的功能,而实际上其设置并不能完全达到安全性的要求。为此,笔者就目前自动扶梯和自动人行道几种安全保护装置的设置提出自己的几点看法。
1问题1:用速度监控装置实现防逆转保护1.1设置形式
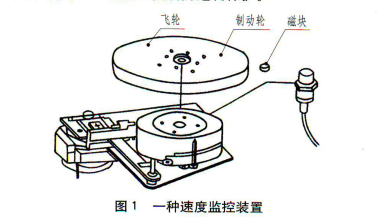
目前自动扶梯和自动人行道的防逆转保护装置的形式很多,而用速度监控装置实现防逆转保护(如图1所示),实际上不能完全实现防逆转保护。
1.2问题分析
非操纵逆转保护实现的关键是逆转信号获取的真实性。如果不考虑逆转信号获取的真实性,再可靠的PESSRAE认证也无济于事,都会给自动扶梯和自动人行道的使用埋下先天不足。这种设置存在的不足之处在于,当自动扶梯和自动人行道的主传动链(或三角皮带)断裂或脱落时,自动扶梯和自动人行道实际上就出现了非操纵逆转。而这时电动机工作是正常的,所检测到的速度信号也为正常,这样就不能及时制止自动扶梯和自动人行道逆转的危险发生。
从根本上讲,这样的防逆转装置获取的信号并不是梯级(或踏板)真实的运行方向和速度信号,是一种假象的防逆转装置,也只能称为是电动机的速度监控装置,供控制系统的反馈信号使用。因
而,用这种设置作为非操纵防逆转保护装置是不合理、不安全的。
1.3科学的设计
直接从梯级(或踏板)处获取信号,或者从梯级(或踏板)链处获取信号,作为防逆转的信号。这样才能实现真正的非操纵逆转保护。
2问题2:用梯级滚轮信号作为梯级(或踏板) 缺失保护2.1设置形式
梯级(或踏板)缺失监控装置是为了防止因其缺失后由于人员疏忽而造成的乘客被剪切或挤压伤害。有一种将梯级(或踏板)的滚轮是否存在作为梯级(或踏板)的缺失保护装置,这不能真实地反映梯级(或踏板)是否缺失。如图2所示。
2.2问题分析
这种设置不科学的原因是:自动扶梯和自动人行道的梯级或踏板全部(或部分)缺失后,其滚轮并不一定会缺失。因而,这并不能真实地反映梯级或踏板的全部(或部分)缺失。这将给使用带来一定隐患。
2.3科学的设计
安全可靠、科学合理的设计是:直接检测梯级或踏板是否存在。其形式有:机械式、光电式等直接检测梯级或踏板是否存在的装置。目前常见的光电检测装置形式是在上、下两个端站设置梯级(或踏板)缺失检测装置。如图3所示。

3问题3:用扶手带滚轮的速度作为扶手带速度偏离保护
3.1设置形式如图4所示,这种形式的扶手带速度的偏离检测不合理之处在于:用驱动扶手带的主动轮的速度判定扶手带速度是否偏离梯级、踏板或胶带的实际速度。
3.2 问题分析
扶手带的速度由压滚轮的速度以及压滚轮与托轮之间的压力决定,即由压滚轮与扶手带之间的摩擦力决定。
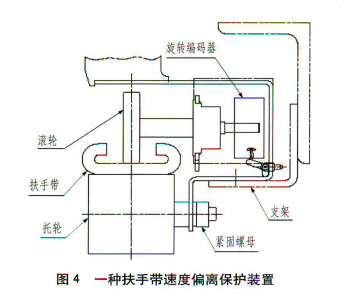
当压滚轮与托轮之间的压力小时,压滚轮与扶手带之间的摩擦力就小,压滚轮与扶手带之间就会产生打滑,扶手带的速度就小于压滚轮的线速度。这时,旋转编码器检测的速度并没有偏离,而实际上扶手带运行速度已偏离。这样就不能真实地反映扶手带的运行速度。
3.3 科学的设计
解决的办法是将旋转编码器安装在托轮处,用检测托轮的速度来代替扶手带滚轮的速度较为合理。这样检测到的扶手带速度只会提前于设计的运行速度,不会因扶手带速度的滞后而造成危害。
4结语
安全保护装置的有效性是自动扶梯和自动人行道安全运行的基础,保护装置的有效性必须在设计环节予以考虑。设计环节考虑的重点是:(1)保护信号的真实性,即保护装置的有效性。(2)信号获取后控制的可靠性,即控制电路要通过PESSRAE认证。
